Take a look at some of the exciting industrial automation projects we’ve tackled over the past couple of years. At Industrial Automation Solutions, we’ve had the privilege of contributing to a diverse range of applications. Below, you’ll find a selection of our more notable projects. Many of these include videos that offer a behind-the-scenes look at the development process right here in our shop. We invite you to explore our capabilities and see our solutions in action!
A manufacturer of silencers for fire arms was looking to update their current painting and sandblasting process. We updated the current system by utilizing the latest Mitsubishi Electric RV series articulated arm robot. Along with 2 MR-JE series servo amplifiers for the paint gun up and down motion and part rotation. The FX5U PLC was used for controlling the robot along with the servo motors and a GT2512 HMI for visualization.

An aftermarket high performance auto parts manufacturer AFE Power contacted Industrial Automation Solution to build an automatic urethane pouring system. The system consists of 2 universal robots with a 6 station rotating carousel table. Utilizing a Mitsubishi FX5U PLC accompanied by a GT2510 HMI and 3Kw servo amplifier with servo motor.

Robotire contacted us to program a pair of industrial robots for removing a tire and rim from a hub and placing the tire on a tire removal/installation station. The tire removal/installation station would install the new tire on the rim and then the larger robot would put the tire on a balancing station. After completing the balancing the robot would finally put the tire back on the hub.

Industrial Automation Solution was approached by NovelTherm to build the controls for their geothermal heat engine. NovelTherm is an innovator in the geothermal green energy arena. They were interested in both controlling the Stirling heat engine and logging extensive amounts of data.

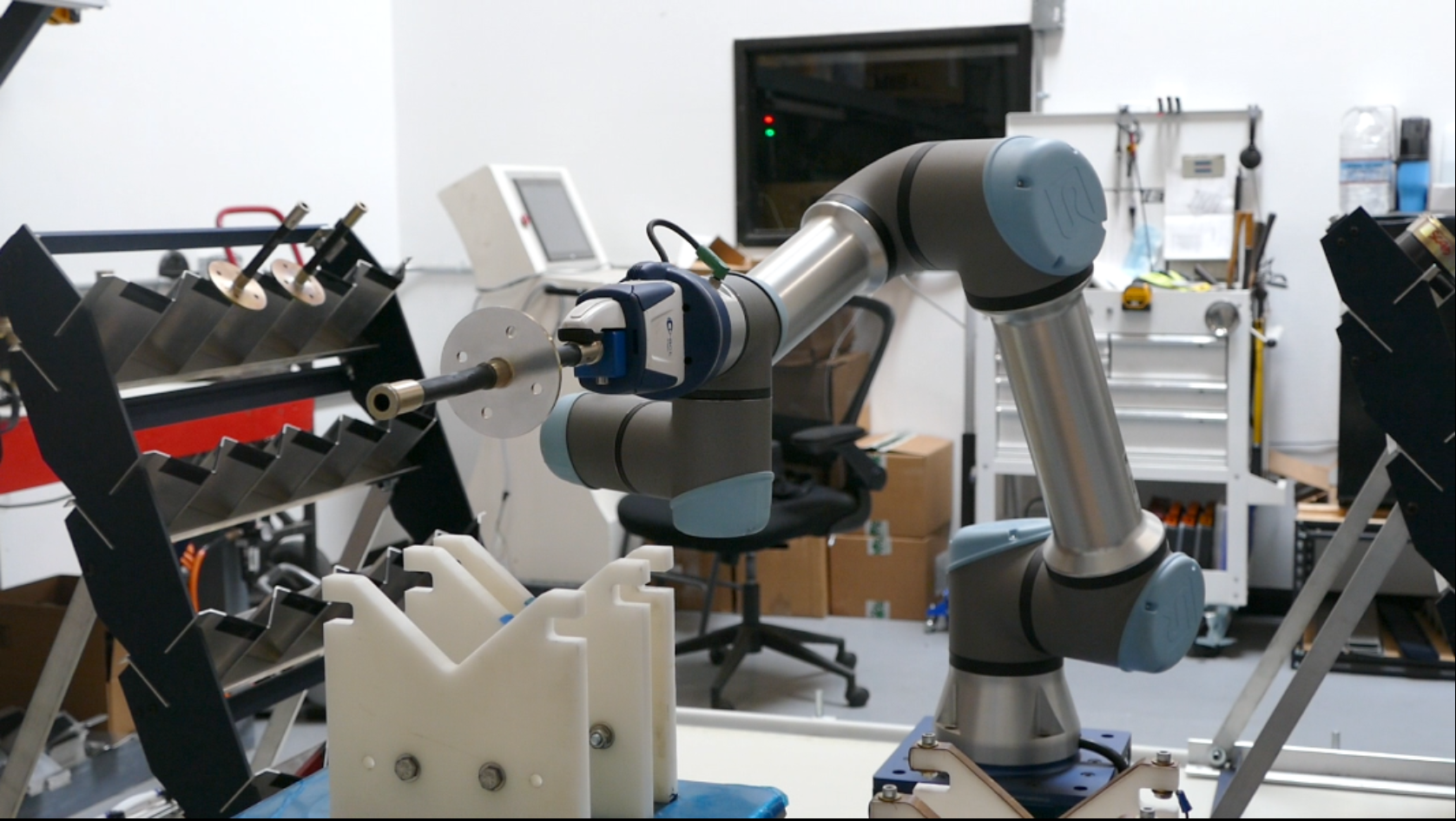
A Local Aerospace company that manufactures fuel isolation rods was looking to automate their quality control testing procedure. Industrial Automation Solution was contracted to build a robotic testing cell to weight the parts and measure resistance using a Hypot.
We designed, built, and installed an automated trolley system, providing our client with a solution for efficient and reliable material handling. This project involved the integration of a Mitsubishi PLC for precise control and a user-friendly interface for seamless operation.

Another interesting industrial automation project was for CaPlugs. They are a plastic parts manufacturer. They asked Industrial Automation Solution to update the existing controls on their plastic parts automated parts dipping machine. We provided a PLC, HMI and Servo control over an Ethernet network.

Fences for Less purchased a machine from China that will be used to cut or scribe an aluminum fence post. The machine did not come with the controls from China and there was another integrator that specified the controls. After purchasing the controls, the integrator disappeared.

Solar World was looking to install a solar plant in the desert with single axis controls for over 200 solar panels. These panels would generate 20 Megawatts of energy and the power generated by the panels was sold back to SCE.

Harvard Card was needing to build a packaging line to pick credit cards from a stacker and place them on to a conveyor. These cards were placed on top of each other with offsets to make a multi card package to be sold during the holidays.

The studio needed to control a camera mounted to a rail running down the middle of an aircraft that looked similar to the space shuttle. They were requesting the position of the camera be manually controlled through a thumb wheel and also have the ability to set predefined camera positions.

Ganesh Machinery is a builder of CNC Machines. They reserved a booth at the IMTS show and they wanted to show an articulated arm robot picking parts and tool tending one of their CNC machines. We programmed the robot to handle the tools and remove the parts

Maruchan is a noodle manufacturing company that produces a cup of noodle product and needed to retrofit an existing filler line with 22 axis of servo control. This filler line put a measured amount of powered spices into the cup of noodles.

Every successful automation system starts with a real-world problem—and ends with a machine that performs reliably day after day. Our industrial automation projects represent practical, production-ready solutions built to solve specific manufacturing challenges across diverse industries.
Each project we deliver is engineered from the ground up, combining robust industrial automation machinery, intelligent controls, and carefully selected industrial automation tools. Rather than forcing standardized equipment into unique environments, we design systems that align with existing workflows, space constraints, and operational goals.
Our portfolio includes a wide range of industrial automation machine applications, from material handling and cutting systems to custom assembly and process automation equipment. In every case, performance, safety, and long-term maintainability guide the design process. We focus on machines that not only automate tasks, but also improve consistency, reduce operator strain, and create measurable gains in throughput.
What sets our projects apart is the depth of integration. Mechanical design, controls engineering, and system commissioning are handled as a single, coordinated effort. This approach ensures that automation tools, sensors, motion systems, and software work together seamlessly on the factory floor.
Whether modernizing legacy equipment or deploying a fully custom automation solution, our projects reflect a commitment to reliability, clarity, and engineering discipline. These real-world systems demonstrate how thoughtful automation design can transform manufacturing operations without unnecessary complexity.
Project Description: SolarWorld was building a mega watt solar plant near 29 palms California and was looking to have someone design, program and install controls for single axis photovoltaic tracker system. This system comprised of 200 solar panels where 10 panels share a common VFD drive. The VFD was controlled by a PLC that was calculating peak solar panel position based off time of day and latitude / longitude of the solar plant. There was also a HMI panel to monitor values such as current panel position, current wattage and alarms along with a SCADA system for monitoring and recording values in the PLC via Modbus communications.
Involvement: The solar plant controls was programmed with function block programming using an IEC61131-3 programming software. Originally, the solar program was created by a system integration company that was breaking the daytime hours into even increments and moving the panels based on the time of day. Later it was changed to follow an algorithm that tracked the position of the sun and allowed for backtracking (taking in consideration of the shadowing of the solar panels). This new program also gave the flexibility to implement the program anywhere in the world by knowing the latitude and longitude of the solar plant. The program was tested in the field and verified to work as described.
Project Description: The customer, who works for the engineering team for the movie Gravity, was looking to build a portable control unit to control a camera on a movie set. The camera was mounted on a stand that was pulled and pushed through the middle of a space shuttle like plain using a cable and reel which was attached to a servo motor. The servo motor was controlled using a single axis motion controller and had a user interface that was used to set specific camera stop positions or they could drive the camera in a manual control mode to any location. Also, the had a manual pulse generator connected to a 8 inch wheel that they could turn that varied the position and speed of the camera.
Involvement: At the beginning of the project, the customer supplied mechanical drawings and other technical specifications for us to size the servo motor and amplifier. We also supplied them with basic training and examples of how to program the user interface and motion controller. During the programming process, we supported the engineer technically to help them complete the project on time. During the commissioning of the system, we went to the studio several times and helped with startup and programming.